


宝马发布细节主动巡航控制系统
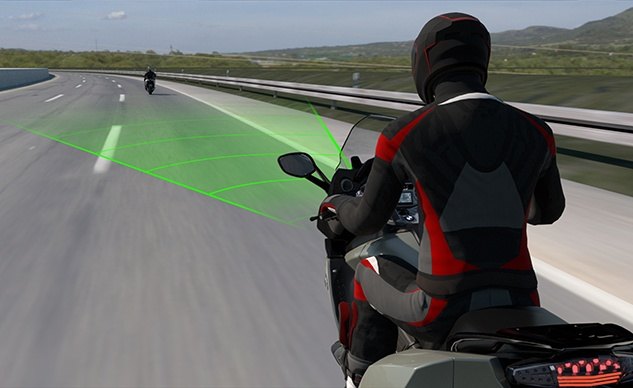









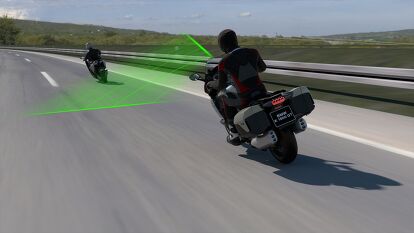
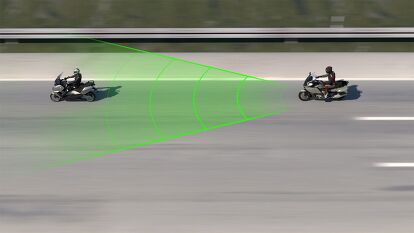


宝马对其新公布的细节主动巡航控制系统博世的系统,它的版本自适应巡航控制系统技术。任何名称,系统使用雷达传感器来检测对象的摩托车和调整巡航速度保持一个安全的距离。
我们自己的瑞恩•亚当斯获得了第一手观察博世的系统在2018年,两者兼而有之KTM此次将为和杜卡迪已经宣布计划将这项技术引入到他们的摩托车早在2021年,宝马是第一个详细描述如何工作。

有源系统,乘客可以设置巡航速度和距离的摩托车。只要该区域范围内的摩托车很清楚,巡航控制系统将保持速度。
设置/ Res按钮选择当前骑速度巡航控制。按它向前再增加1英里(短按)或5英里(长按)。压低的按钮再增加一组速度5英里,直到它被释放。按下按钮后降低了速度。按下按钮距离之间的切换三个设置:短期、中期或长期。
与常规巡航控制系统,乘客可以覆盖速度通过扭曲节流。巡航控制系统可以通过刹车或将关闭节流阀手柄向前过去休息位置。巡航控制的离合器中断申请1.5秒。宝马的系统有两种模式,舒适和动态,积极影响系统加速或减慢。

如果雷达传感器检测的距离内,巡航控制系统降低了速度,直到它重新获得一组分离距离。雷达传感器忽略了静止的物体,只有对移动对象的反应。骑士仍然需要手动控制时,例如,停在一个红绿灯或在交通堵塞。

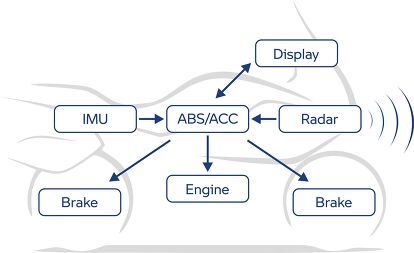
传感器考虑摩托车的速度和角速度,预测道路穿过下一个100米,以确定是否侵犯另一辆车的距离。距离控制器发送一个目标加速度(加速度阳性或阴性减速)通过CAN总线连接到ABS和巡航控制系统。ABS计算引擎的驱动转矩和制动扭矩调整速度(如果需要的话)。

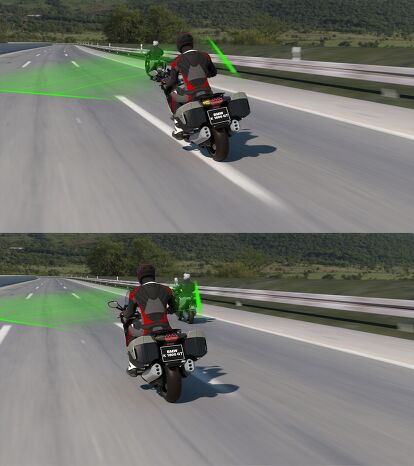
主动巡航控制超车时同样适用。使用旋转指示器激活系统的超车助理功能,准备从车辆开关被传递给车辆在新巷。
宝马表示,其主动巡航控制在角落工作,但限制了速度保持有限的倾斜角度舒适将(宝马列表20度为例)。系统将限制任何突然制动或加速动作。

雷达传感器也作为一种碰撞警告,即使主动巡航控制是禁用的。第一级预警警报当检测到车辆前方,暗示骑手干预是必须的。二级警告是在当系统检测到一个更危险的情况下,系统预计不能保持一个安全的距离,紧急制动是必需的。由于安全原因,主动巡航控制本身不能执行紧急制动;骑士仍然需要准备应急措施。
宝马没有列出当我们将看到主动巡航控制生产摩托车,但我们可能看2021年,与杜卡迪和KTM此次将采用的技术。宝马的样本图像显示系统装备K1600GT但我们预计它将在一个广泛的模型。可能会有一些监管障碍,所以目前还不清楚如果宝马将在所有市场提供技术。





































评论
加入谈话
这样的事情,让我访问以下网站;http://progress-is-fine.blo…
http://disq.us/p/1p01ilm